Chapter 8 - Ordinary Differential Equations
Reference "Mathematical Methods in the Physical Sciences" 3e by Mary L. Boas.
Differential equations are equations that contain both a function and it's derivative. Partial differential equations contain partial derivatives: If there are no partial derivatives, it's an ordinary differential equation. Some properties:
- Order is the highest derivative in the equation (i.e. is second-order).
- Linear equations will take the form where and are constants or functions of the independent variable (), but not of the dependent variable (). is nonlinear.
- Solutions usually mean to solve for the dependent variable: i.e. .
A linear differential equation of order will have a solution (the general solution) containing independent constants , from which all solutions of the diffeq. can be found by changing the values of the independent constants .
The values of these constants can be found using boundary conditions or initial conditions (at ).
Separable Equations
Separable differential equations are those for which we can separate the variables, putting the dependent variable on one side, independent on the other: The general solution will often have some form which represents a family of solutions (by varying ). A particular solution is therefore some single value of .
Nonlinear equations
Separable equations may also be nonlinear, such as Solving it as a separable equation yields which allows for only non-negative solutions for , and is not valid for ( for is undefined).
First-Order Equations & Int. Factor
Linear first-order ODEs take the form and are most easily solved via an integrating factor.
- Let
- Write the equation as
- Integrate and solve for .
Nonlinear First-Order Equations
There are other methods to solve specific (but not all) first order equations.
Bernoulli equation: for equations of the form
- Let:
- Multiply both sides by :
- Substitute in and :
- Solve for with integrating factor.
- Substitute (again) and find .
Exact equation: exact differentials (or "perfect" differentials) of some function (even an unknown one) have the property Integrals over them are path-independent.
- Let some function exist, such that
- By the definition of exact differentials, , and
TODO: Review chapter 6, section 8 for more information on finding .
Homogenous equation: a homogenous function of and of degree is one that can be written i.e. is homogenous of degree 3.
The equation where and are same-degree homogenous functions, is also homogenous. Dividing them cancels the terms as in the definition.
- Write
- Make the change of variable , such that
- Solve the resulting separable equation in and .
- Reverse-substitute to solve for .
Constant-Coefficient SOLDEs (Homogenous)
Second-order linear differential equations (or SOLDEs) with constant coefficients tend to look like and are homogenous if . They are solved using the differential operator , such that Solve for the roots as a second-order polynomial. Solutions vary based on multiplicity and complexity.
- If the roots are real and distinct ():
- If the roots are real and have multiplicity of 2 (i.e. ):
- If the roots are imaginary (): (I tend to use the second solution (5) - it's easiest and simplest).
Oscillators
Hooke's law + Newton's 2nd say that, for some simple harmonic oscillator, where is the spring constant and is the "retarding force".
Let and . This turns into The roots to the differential operator are , with three scenarios for answers:
Overdamped: is real and has two distinct solutions, so
Critically damped: , so real roots with one distinct solution.
Underdamped: , so imaginary roots
Method of Undetermined Coefficients
Non-homogenous constant-coefficient second-order linear differential equations The general solution to this equation is the sum of the homogenous and particular solutions: The particular solution can be found primarily through the method of undetermined coefficients.
- Let take the form of one of the solutions below, based on what looks like.
- Calculate and .
- Substitute in the guesses into the diffeq, then solve for the constants.
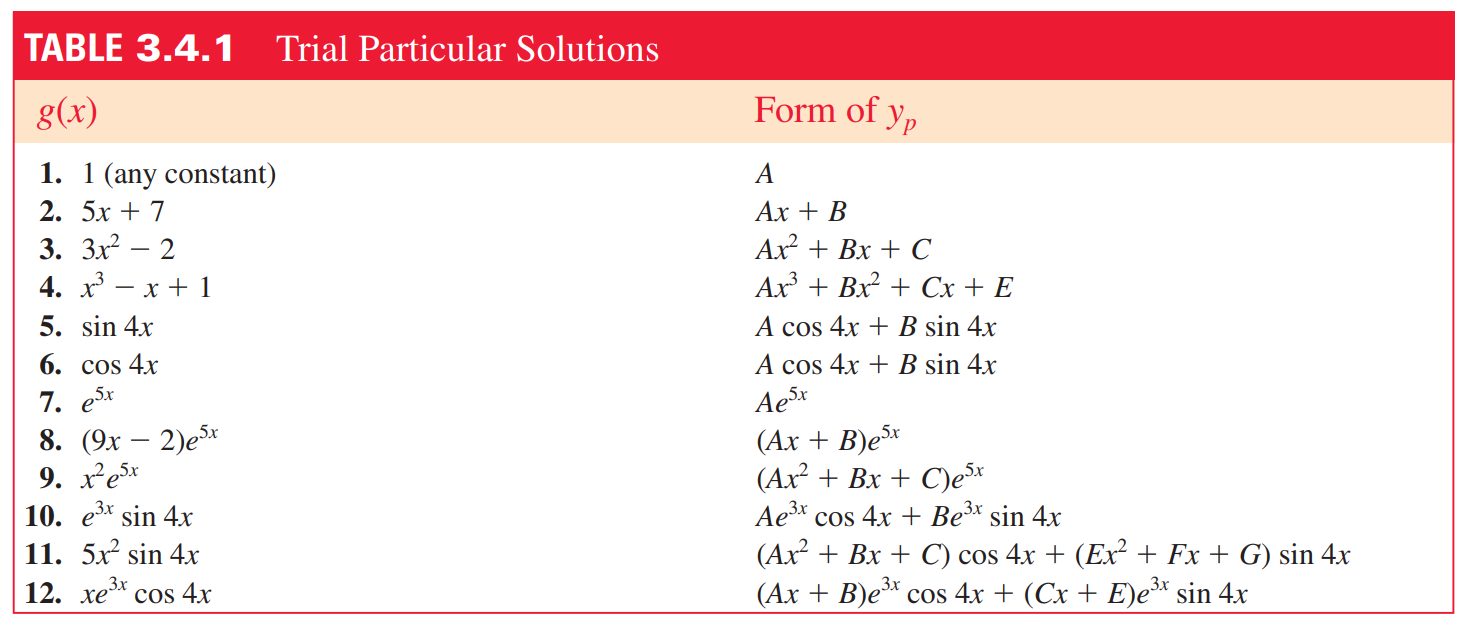
The textbook provides some additional solution options for equations of the form , where is some polynomial of degree .
Note: if there are several terms on the right-hand-size, we can use superposition with each term to find .
Other Second-Order Equations
Some other special second-order equations with methods to solve them are shown below.
(a). Missing dependent variable If is missing from the equation, substitute and . Solve for , then reverse-substitute and solve the first order equation for .
(b). Missing independent variable If is missing, let (c). . Multiply by , then integrate to get (d). Cauchy/Euler equations if equation has the form can be reduced to SOLDE C.C. by substituting to get (e). Reduction of order to find a second solution of given one solution , substitute into the differential equation and solve for .
Laplace Transforms
Laplace transforms are way to solve differential equations - for some function ,
For example, if , . This can be converted back into the original function by referencing a Laplace transform table.
Paul's Math Notes (of course) has a wonderful table here.
To use it,
- Apply the Laplace transform to all terms in the differential equation (both left and right).
- Plug in initial conditions.
- Group (or ) terms and try to isolate terms on each side (all terms on one side, terms on the other).
- Use table to find inverse Laplace transform of .
- If there isn't an exact equivalent on the table, try using partial fraction decomposition or other techniques to separate into individual terms, and sum them.
For higher orders of differential equations, plug into and use integration by parts.
Dirac Delta Functions
The Dirac delta function lets us model functions which change rapidly over a very short () period of time, such as unit impulses (a hammer strike, or the impact of an air particle).
 at is mathematically infinite - not very useful at all. Instead, we can represent this increase by a delta function:
This is a generalized function, with the following properties:
at is mathematically infinite - not very useful at all. Instead, we can represent this increase by a delta function:
This is a generalized function, with the following properties:
- Derivatives of the function turn into derivatives of :
- is an operator. Let .
Some other properties: can also work in two and three dimensions, and vectors:
Finally, in three dimensions we have two useful operator equations:
Green's Function
I'm not confident in my knowledge of these - Boas 8.12 has more info on them, but the presented examples seem surprisingly complicated.
As far as I can tell, just as for there is some (for invertible matrices) such that , is a similar transform for differential equations such that - see this Stack Exchange post.
The Wikipedia page on Green's function says that, if is some differential operator, then
- is the solution of the equation .
- The solution of the IVP is the convolution .
From Boas: for some differential equation , we can represent as a sum of unit impulses: For instance, if models the air resistance on some oscillator, a unit impulse might be a single air particle bouncing off the oscillating object.
The differential equation in terms of unit impulses can be written with being a differential operator (like or ): and the solution is
The example on the Wikipedia page for Green's function provides (in my belief) a much better explanation than Boas does.