Chapter 1 - Relevant Mathematics
Reference "Introduction to Electrodynamics" by David Griffiths.
Vectors
We start with a brief review of vector algebra - I'll skip most of it but keep the key things.
Dot product
The dot product is a measure of how "parallel" two vectors are, maximized when parallel, minimized (0) when perpendicular.
It is commutative () and distributive (). The result of the dot product is a scalar.
Cross product
The cross product yields a third vector orthogonal to both and , maximized in magnitude when and are themselves orthogonal to one another.
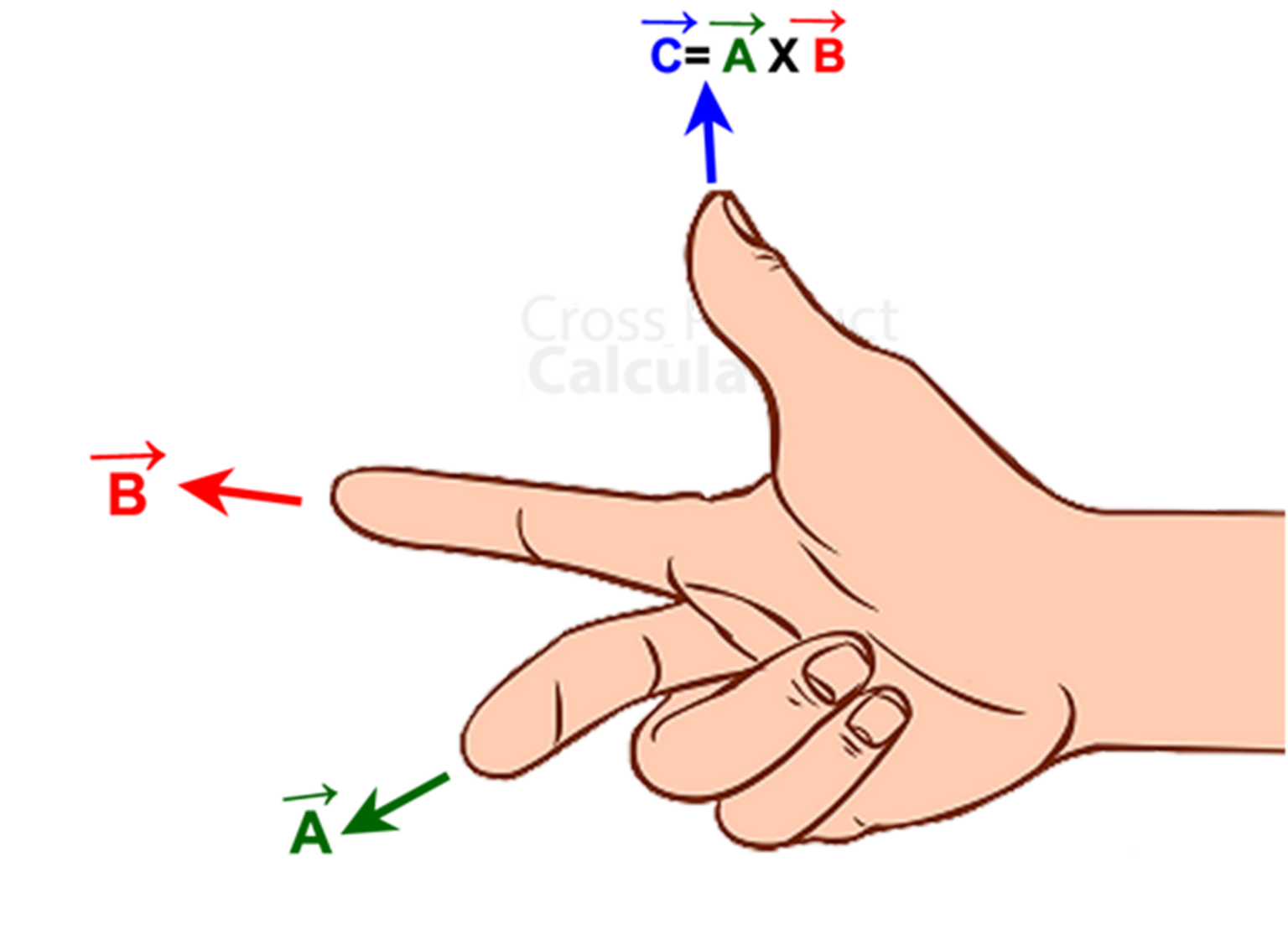 The cross product is distributive, but not exactly commutative - instead,
Some other properties:
The cross product is distributive, but not exactly commutative - instead,
Some other properties:
- The result of the cross product is a vector, not a scalar.
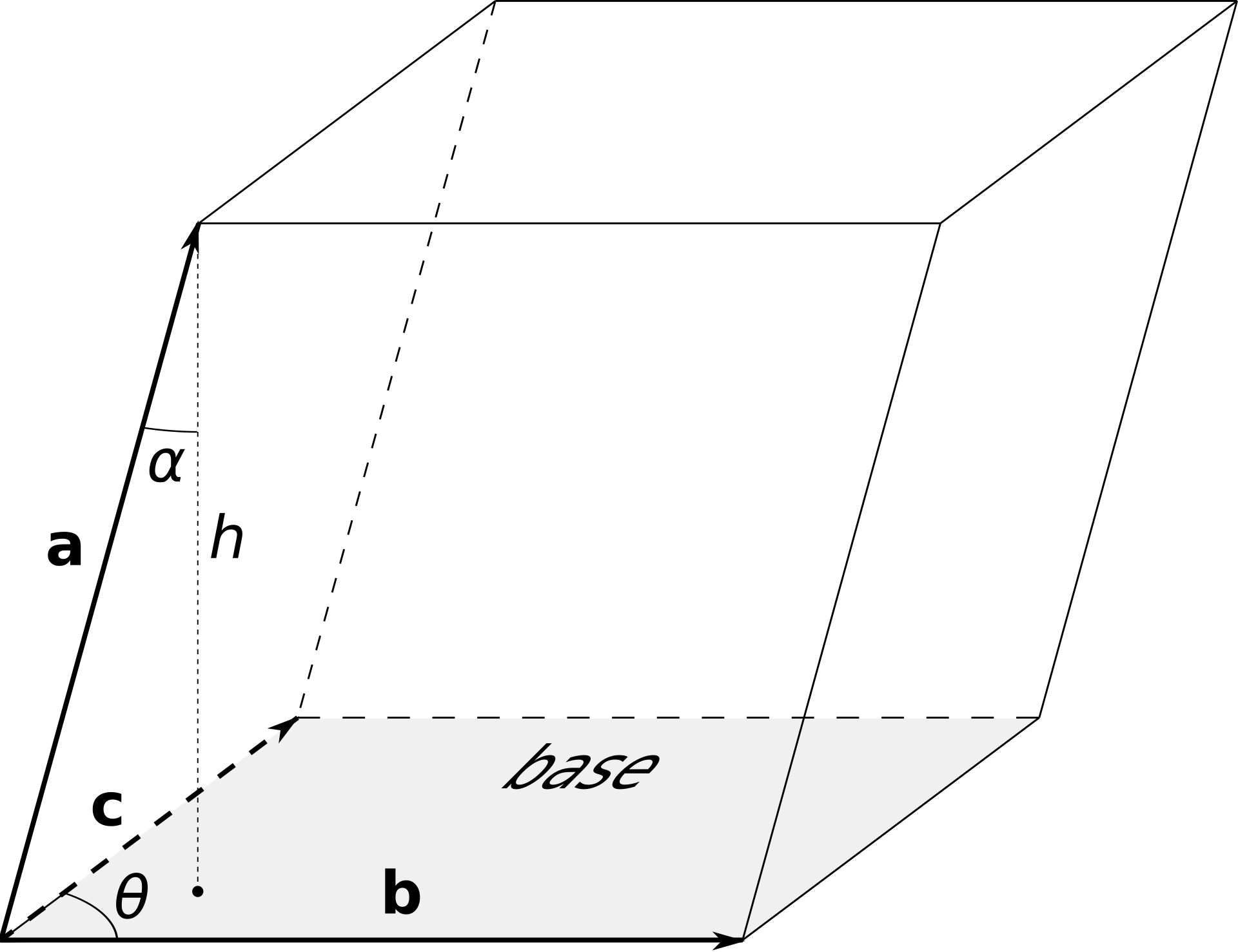
- The magnitude of the cross product is the area of the parallelogram generated by and .
- The cross product of a vector with itself is zero.
We can calculate a cross product like so:
where is the normal to the plane formed by and .
Vector triple product
Triple products are combinations of cross and dot products.
-
Scalar triple products: the magnitude of this is the volume of the parallelepiped (3D parallelogram) generated by , and .
-
Vector triple products: there's no easy geometric interpretation of this, but is useful to reduce complex cross product calculations. It can be memorized by the mnemonic BAC-CAB.
Spatial vectors
The position vector indicates the position of a point relative to the origin.
 In electrodynamics, usually we'll have two points: one for the source charge and one for the test charge. The vector from one to the other is the useful quantity then.
In electrodynamics, usually we'll have two points: one for the source charge and one for the test charge. The vector from one to the other is the useful quantity then.

The Del Operator
Del () is a vector operator that acts upon functions, and is defined as really only is meaningful when applied to functions, and has three (usual) ways of being applied:
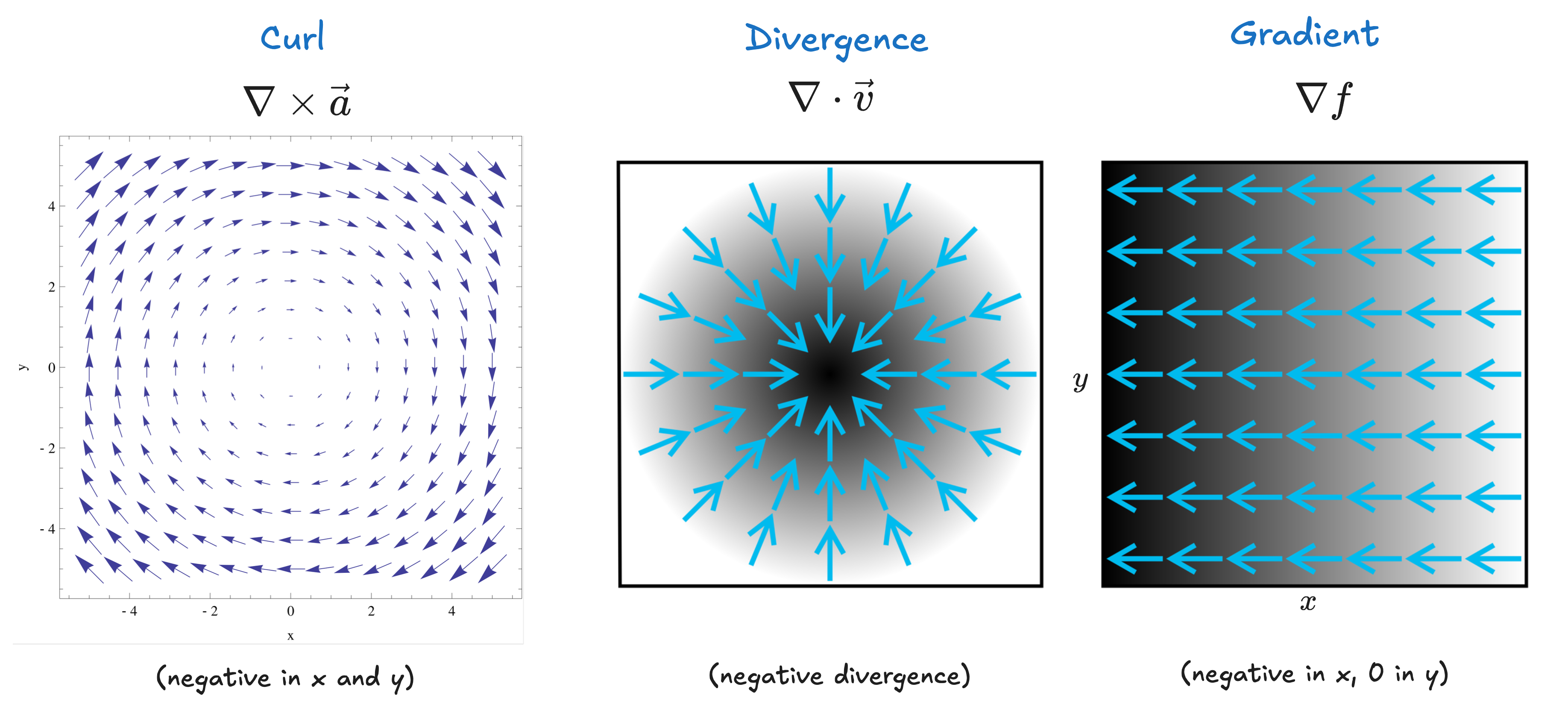
- To a scalar function () to get the gradient of that function.
- To a vector function via the dot product () to get that function's divergence.
- To a vector function via the cross product () to get that function's curl.
Gradients
The gradient of some scalar function gives a vector result that will point in the direction of the max rate of increase of that function.
and results in a vector with the derivative of the original function's units.
Fundamental theorem for gradients
Important: The integral of a derivative (here, the gradient) is given by the value of the function at the boundaries and .
Divergence
The divergence of some vector function represents how much the function "spreads out" or diverges from a given point. and results in a dimensionless scalar value indicating the rate of divergence from a point.
Green's theorem
Green's theorem is a special application of Stoke's theorem (see below). Geometrically, it relates the sources contained in some surface to the flux emitted by those sources around the boundary of a surface. In the case of electrostatics, this might be the flux field generated by some charges in a volume to the total, superposition flux coming out of that entire region - turning one "field of charges" into a single charge.
The integral of a derivative over some region will always be equal to the value of the function at the boundary () - in this case, the boundary term is an integral (a simple line may just have two endpoints, but a line bounding a volume forms a closed sufrface).
Curl
The curl of some vector function represents how much the function "swirls around" some given point. Positive curl is given by the right-hand rule (normally counterclockwise).
Stokes' Theorem
The integral of the curl over some surface is the "total amount of swirl" on that surface - and mathematically can be distilled into just finding how much the flow is following the boundary of that surface. This last quantity, is sometimes called the "circulation" of some vector field .
A Note on Del Squared ()
Enumerating over the ways we can apply twice:
- Laplacian: the cross product of with the gradient of a function results in the Laplacian, such that
- Curl of gradient: always zero.
- Gradient of divergence: not a lot of physical applications, calculable though.
- Divergence of curl: always zero.
- Curl of curl: most easily defined as the acceleration of the swirl, like a hurricane speeding up.
Integrals
In electrodynamics, we have line (path) integrals, surface integrals (or flux) and volume integrals.
Line integrals
Iterate over infinitesimally small displacement vectors . If , the line integral iterates over a closed loop and we can write
In elementary physics, a common example is work done by a force.
While path taken normally matters (distance), there are some vectors where only displacement matters (for forces, these are called conservative forces, like gravity).
Wikipedia has a really cool animation of line integrals:
Surface integrals
Surface integrals iterate over infinitesimally small areas , with norms perpendicular to the surface.
In this case, if the surface is closed (i.e. like a sphere, rather than a hill), then we can write it in closed loop form.

Surface integrals are really useful for things like flux where something is moving through some area - i.e. imagine radio waves passing through a curved gas cloud or radiation falling "through" a planet.
Volume integrals
Volume integrals integrate over infinitesimally small volumes .
If some function represented density of a substance, then the volume integral over it would be total mass.
Integration by Parts
Also known as the "inverse product rule".
Curvilinear Coordinates
Taking another look at spherical and cylindrical coordinates, as well as how to convert between them.
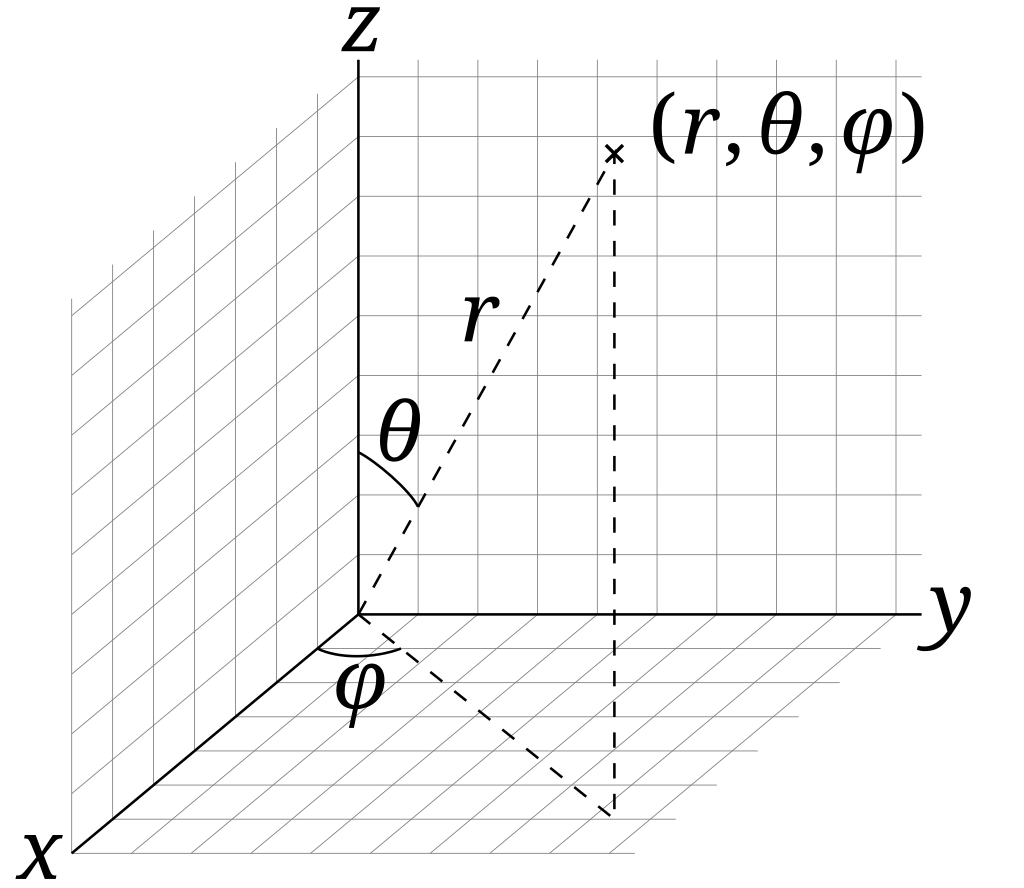
Spherical coordinates
Three terms:
- : the distance from the origin (range 0 to )
- : the polar angle from the -axis (range 0 to )
- : the azimuthal angle along the -axis (range 0 to )
Alternatively in terms of the unit vectors:
The interesting thing about the matrix form is that it is orthogonal - according to the invertible matrix theorem, for orthogonal matrices.
We can use this to solve for , and easily then by just taking the transpose of the above matrix.
Our line element in spherical coordinates is
In terms of triple integrals, the textbook has a good graphic to represent the three displacements .
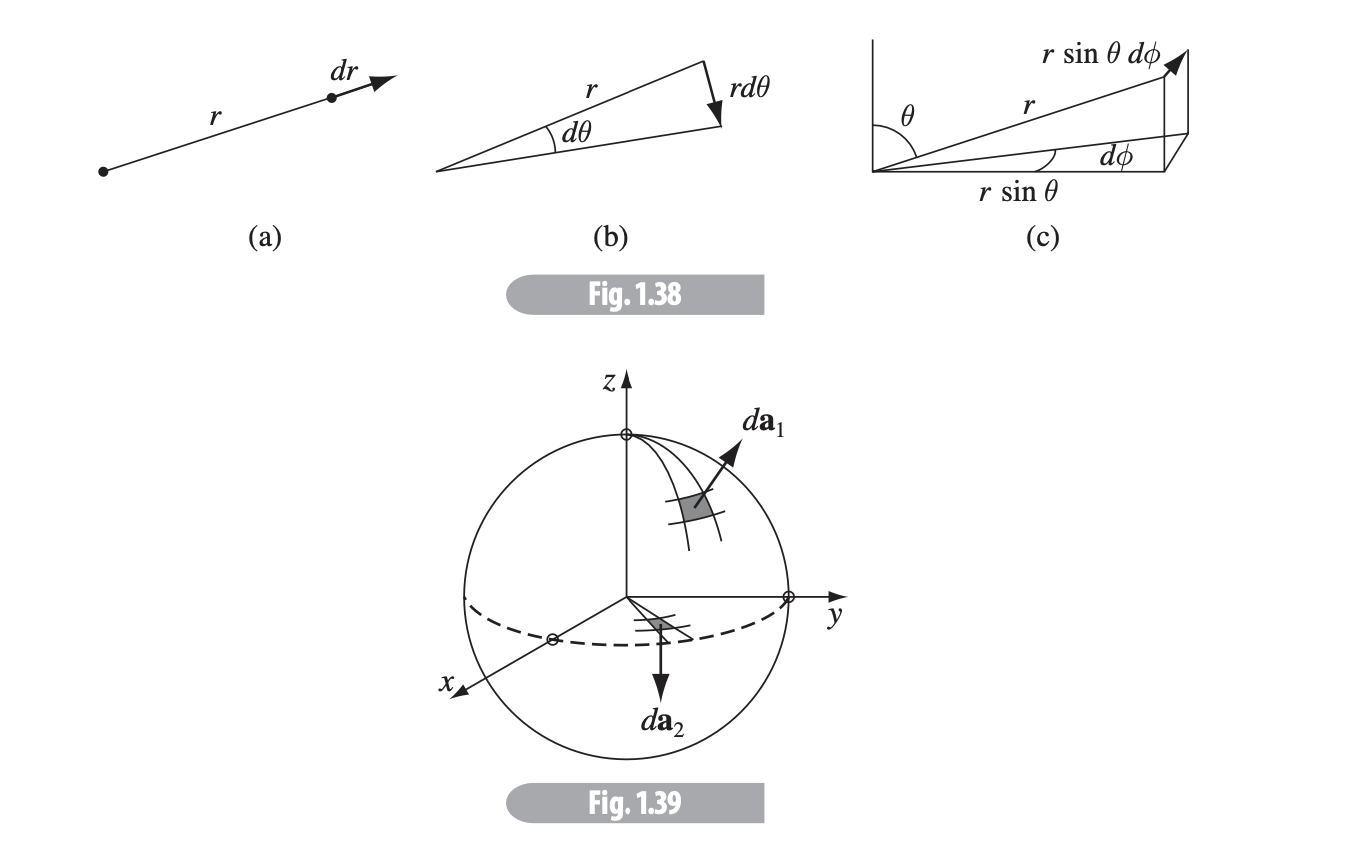
And a infinitesimal volume element is the product of these three:
has a possible range from 0 to , from 0 to and from 0 to .
The textbook represents the spherical representations of the gradient, divergence, curl and Laplacian in eqs. 1.70-1.73.
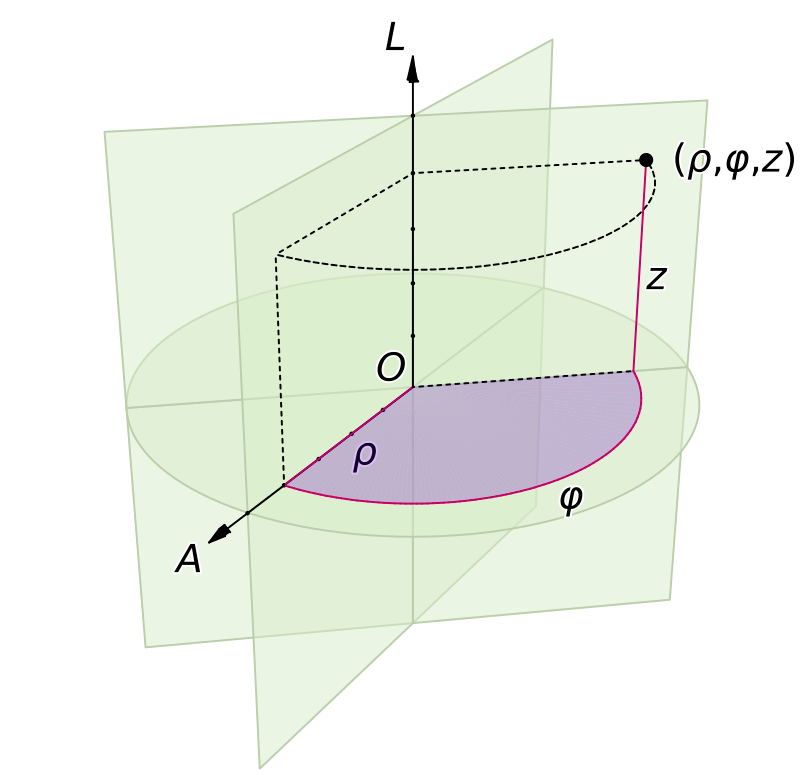
Cylindrical coordinates
Three terms:
- : distance from -axis
- : azimuthal angle along -axis
- : height along z-axis
 with unit vectors
with unit vectors
For triple integrals, the infinitesimal displacements are our volume element is and line displacement is
Dirac Delta Function
Imagine we have an infinite point mass at the origin, and it is the only thing in the universe.
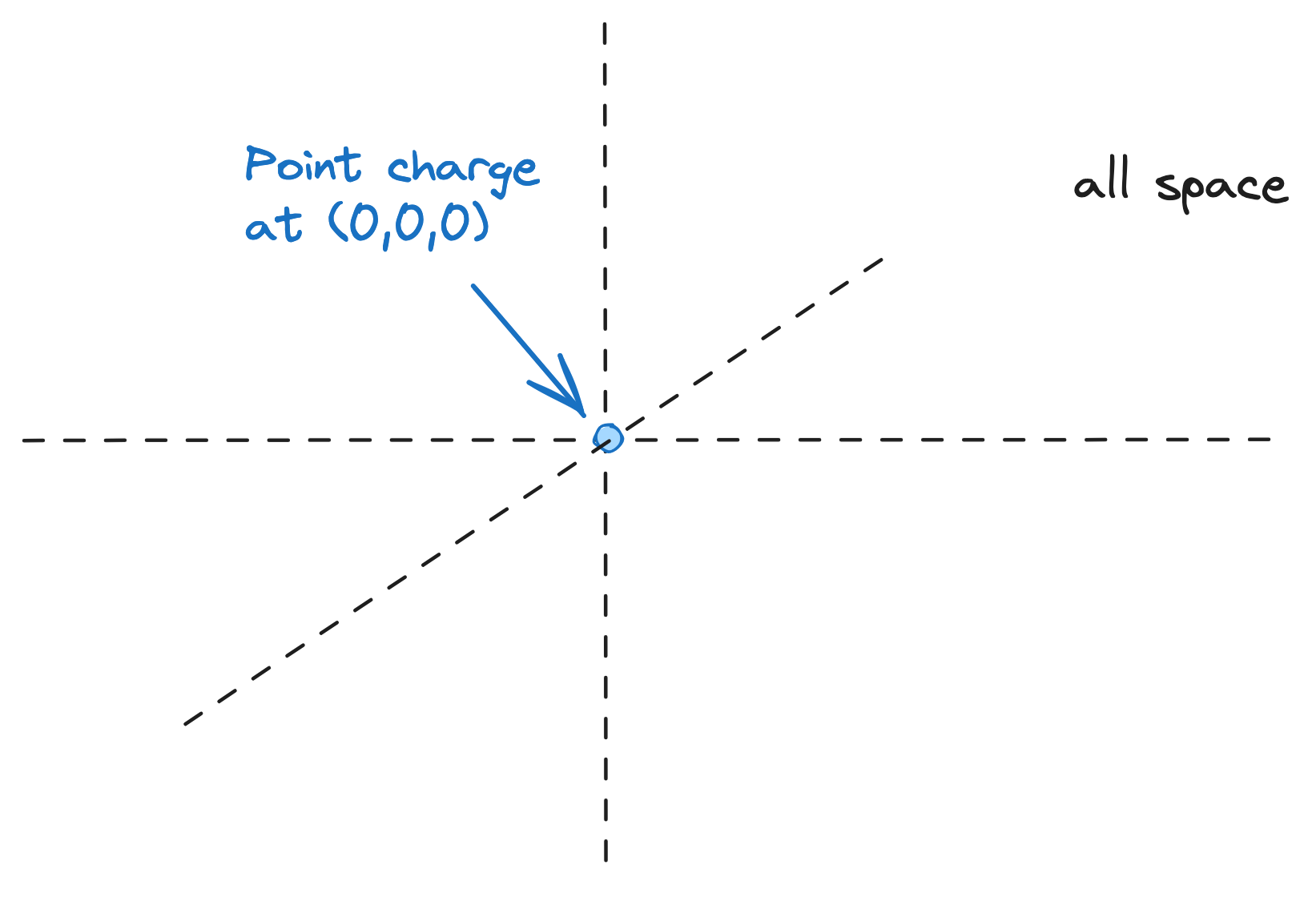 The total mass of the universe must be just the mass of the point charge; but the point charge exists only at , and is a point charge - it has no spatial dimension. If we were to integrate over the entire universe, we'd find we have just the mass of the point charge - and can mathematically represent that with the Dirac delta function.
The total mass of the universe must be just the mass of the point charge; but the point charge exists only at , and is a point charge - it has no spatial dimension. If we were to integrate over the entire universe, we'd find we have just the mass of the point charge - and can mathematically represent that with the Dirac delta function.
and Therefore, if we have some continuous function (could be a constant or a function, anything attached to ). which brings us to the neat and nice identity:
Dirac Delta in 2D, 3D
And, unsurprisingly,
Note on : with (the separation vector), and Reference the textbook equations 1.100-1.102 for derivation.